6月13日,在2025第十七届轩辕汽车蓝皮书论坛驾术专场,百度地图副总经理刘增刚发表主旨演讲,分享了百度地图在智能辅助驾驶安全及平权中的价值思考和应用实践。他表示:“成本可优化,技术可迭代,但保障安全的冗余防线绝不能减配。智能辅助驾驶的终点,是所有人都能安心出发的起点。我们愿做陪伴大家安心抵达终点的地图。”

地图价值强势回归
过去几年,智能辅助驾驶技术高速发展,端到端、“无图”方案纷纷登场,传统地图的价值一度被忽视甚至质疑,“谈图色变”怪象频频出现,似乎如果用图的智能辅助驾驶技术就不够先进,即便用了图也不能对外说!但今年以来,尤其是在智能辅助驾驶安全事故引发行业反思、监管趋严的背景下,讨论回归理性,安全重新成为智能辅助驾驶发展的核心焦点。
主流的端到端智能辅助驾驶方案上限提升逐渐触及瓶颈,难以有效应对最后1%的Corner case难题。“智能辅助驾驶到底需要一张什么样的地图呢?我们的判断是:既不是“无图”,也不是传统高精!百度地图的答案是LD地图,即车道级导航地图。”刘增刚表示,智能辅助驾驶不是炫技,安全是智能辅助驾驶底线。随着安全重回行业关注的核心,业界开始重新审视地图对智能辅助驾驶的增量价值,地图正在实现“价值回归”。
作为拥有20年行业经验的百度地图,持续思考和实践智能辅助驾驶的安全保障。今年4月,百度地图V21版本正式上线,全面升级为全球首个“智驾级·导航”,以“智驾级·LD数据”、“智驾级·车道导航”、“智驾级·AR导航”、“智驾级·SR导航”、“智驾级·AI导航”五大能力重构导航体验,致力于为驾驶安全提供更加安全的出行服务保障。

百度LD,为辅助驾驶而生
L2级辅助驾驶依靠车载传感器感知百米内环境,但道路场景复杂,仅凭实时感知不足以保障安全。实践证明,超视距的车道级地图极大提升了驾驶安全。刘增刚指出,百度地图历经五年打磨的车道级地图数据(LD)在提升端到端辅助驾驶表现中具有重要价值,不仅显著降低导航偏航率,也大幅提升辅助驾驶的安全性和智能性。
在复杂路口场景,百度LD地图引导车辆选择更优路径,最少变道降低驾驶风险;一些特殊车道信息,如分时公交道、潮汐车道等难以被智能辅助驾驶系统识别,百度LD地图可精准提供车道语义信息,避免走错道而违反交规。此外,百度LD地图可提供车道级动态事件信息,使智能辅助驾驶系统提前采取降速或降级措施,保障安全。
百度LD数据拥有全球最大车道拓扑网络,覆盖1300万公里路网和300万+精细路口,支持超过200万个停车场数据。依托海量用户反馈的数据飞轮,实现静态数据天级更新、动态数据分钟级更新。目前,百度LD数据是“现货供应”,无论是模型训练还是端侧推理,这套舱驾云三端一体方案可以适用于不同智能辅助驾驶阶段和方案,能够助力车企智能辅助驾驶实现快速量产落地!

行业首创全场景AR车道级导航
百度地图行业首创全场景AR车道级导航,突破传统道路级指引局限,实现车道级精准导航。依托百度地图车道级地图数据,AR导航将虚拟指引与现实车道完美融合,打造车道by车道的沉浸式导航体验。驾驶者无需低头看地图,眼前即显动态车道指引,极大提升行车安全与舒适度。
此外,百度地图依托V21全新至真渲染引擎,全面提升智驾级SR导航的感知与渲染能力,打造沉浸且丝滑的视觉体验。相比传统SR渲染受到黑夜、遮挡、雨雪等显示不稳定的难题,百度V21智驾级SR导航可以扩大渲染视野,消除视觉冲突,实现周边机动车、非机动车、行人等目标的实时精准展示。结合预警和引导功能,智驾级SR导航让驾驶过程更加安心。此外,百度地图创新融合车道元素与智能辅助驾驶决策,清晰展现选道依据,提升驾驶员对智能汽车的信任感。

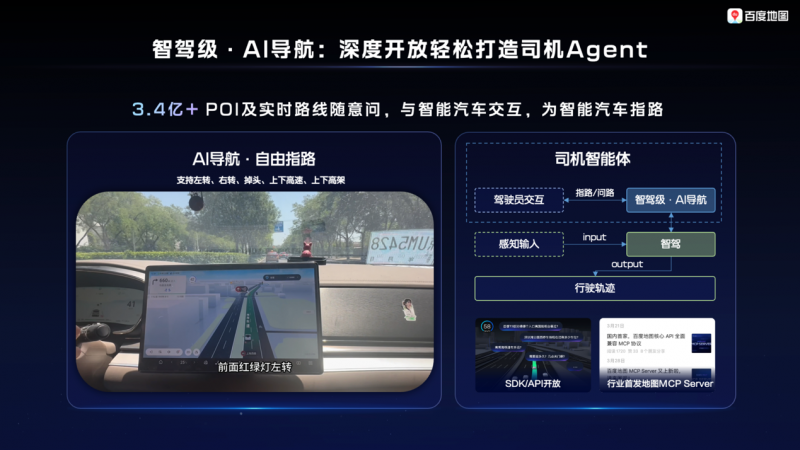
行业首个基于导航的司机Agent产品
在智能座舱快速发展的当下,用户对车载交互的自然性和智能化需求不断提升。百度地图V21发布之际,小度想想产品正式定位为司机的智能出行助手,致力于打造像与真人司机对话般自然流畅的导航体验。无论是调整路线,还是实时应对复杂路况,用户只需用自然语言指令,就能轻松实现对车辆导航的精准控制。
依托百度强大的大模型和自然语言处理技术,结合百度地图3.4亿POI数据和22亿全景照片构建的视觉模型,以及对每次出行路线的深度理解,小度想想升级版为车企提供了行业领先的AI导航解决方案。该智能体不仅支持多场景自然交互,更通过SDK和API形式灵活开放,方便车企快速集成,打造行业首个基于导航的司机Agent产品。今年3月,百度地图率先推出地图MCP Server,开发者通过简单配置即可快速接入地图服务,显著降低智能体应用调用门槛,提升开发效率。
汽车智能化快速发展,安全保障尤为关键。百度地图紧跟时代,持续创新技术、优化服务,致力于推动行业持续向前发展。